현대자동차그룹의 로봇 계열사 보스턴다이나믹스가 휴머노이드(인간형) 로봇 '아틀라스' 개발형 모델의 작동 영상을 처음 공개했다. 연구형을 업그레이드한 '실제 공장 투입 모델'인 개발형 아틀라스는 조만간 미국에서 본격적인 훈련에 돌입할 전망이다.
보스턴다이나믹스는 5일(현지시간) 회사 유튜브 채널에 아틀라스의 기계체조 동작을 담은 쇼츠 영상을 공개했다. 이 영상에 등장한 아틀라스는 종전에 공개했던 연구형이 아닌 개발형으로, 보스턴다이나믹스가 개발형 모델의 작동 영상을 공개한 것은 이번이 처음이다.
보스턴다이나믹스는 지난 1월 세계 최대 가전·IT(정보기술) 전시회 'CES 2026'에서 아틀라스 연구형 모델이 개발형 모델을 소개하는 모습을 연출한 바 있다. 다만 당시에도 개발형 모델은 작동하지 않는 상태였다. 보스턴다이나믹스는 개발형 첫 번째 모델이라는 점을 강조하기 위해 이번 영상 속 아틀라스 몸통 측면에 '001'이라는 일련번호를 새겼다.
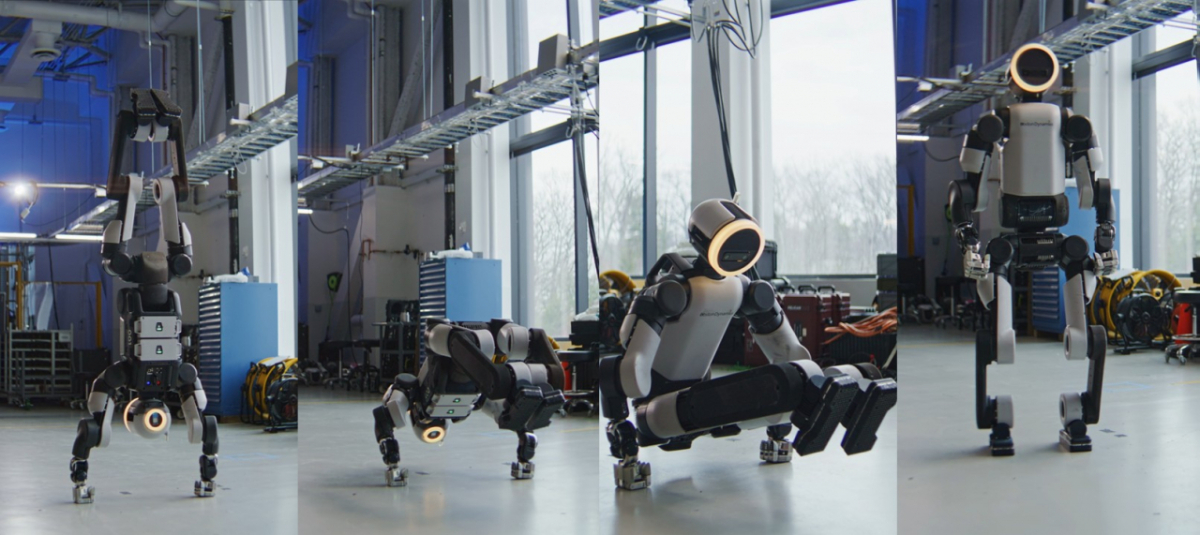
이번 공개한 영상은 아틀라스가 물구나무 자세를 취하는 것으로 시작한다. 아틀라스는 이어 두 손만으로 전신을 지지한 상태로 몸을 수평에 가깝게 유지하는 자세를 했다가, 다시 몸을 뒤집어 'L-시트(L-sit)' 자세를 취한다. 이는 두 손으로 몸을 지탱한 상태로 몸을 'L'자 모양으로 만드는 기계체조 동작이다. L-시트 자세를 약 5초 정도 유지한 아틀라스는 이번에는 몸을 위로 뒤집어 정자세로 일어선다.
아틀라스가 이번 선보인 기계체조는 단순한 균형 잡기나 반복 동작을 넘어 상체, 코어, 팔 관절을 동시에 정밀 제어해야 가능한 동작이다. 특히 접지 면적이 작은 양손으로 전신 무게를 흔들림 없이 지지하는 모습은 보스턴다이나믹스가 높은 수준의 기술 단계에 도달했음을 보여준다는 평가다. 아틀라스가 향후 실제 제조 현장에서 무거운 물체를 들고 이동하거나 비정형 자세에서 작업할 수 있는 역량을 확보했다는 것을 의미한다.
현대차그룹은 이번 동작 구현을 위해 강화학습(Reinforce Learning) 기반의 전신 제어 기술을 적용했다고 밝혔다. 강화학습 기반의 제어 방식은 로봇이 반복적인 시뮬레이션과 시행착오를 거쳐 스스로 움직임과 균형 전략을 학습하는 접근법이다. 특히 접촉 상태 변화와 자세 전환이 연속적으로 발생하는 복잡한 동작을 수행할 때 유용한 것으로 평가된다.
현대차그룹은 연내 미국 HMGMA(현대차그룹메타플랜트아메리카)에 문을 여는 '로봇 메타플랜트 응용 센터(Robot Metaplant Application Center, RMAC)'에 아틀라스 개발형 모델을 투입해 훈련을 시작할 전망이다. RMAC는 로봇 데이터 수집, 로봇 최적화를 위한 발굴과 검증이 이뤄지는 곳이다. 로봇의 구체적인 활용 방법을 모색하고 그에 맞는 로봇 행동을 개발한다. 현대차그룹은 RMAC에서 훈련한 차세대 전동식 아틀라스 개발형 모델을 2028년 HMGMA에 실전 투입할 계획이다.
현대차그룹 관계자는 "향후 HMGMA에 아틀라스 개발형 모델을 투입하고 공정 단위별 검증을 진행할 계획"이라고 밝혔다.