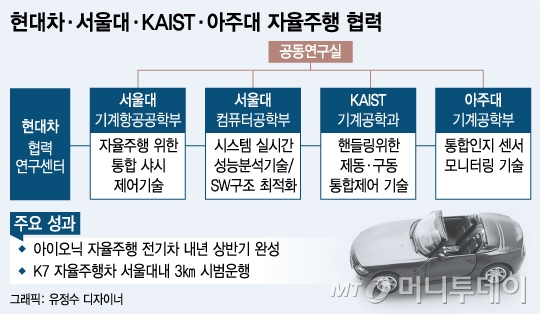
현대차와 서울대-KAIST-아주대 공동연구실이 손잡고 내년 상반기에 고성능 센서를 탑재한 '아이오닉' 자율주행 전기차를 완성한다.
내년초 미국 라스베이거스에서 열리는 'CES 2017'에서 선보일 아이오닉 자율주행 전기차와 비교하면 보다 고성능 센서를 탑재한 미래형 완전 자율주행차 모델을 완성하려는 것이다.
25일 현대차와 서울대 등에 따르면, 서울대-KAIST-아주대 공동연구실은 이달초 현대차로부터 아이오닉 전기차(EV)를 연구장비로 받아 고성능 자율주행차로 개발 중이다.
이 차는 저가의 레이더(radar)는 배제하고 라이다(LiDar: 레이저 레이더)로 불리는 고성능 센서만 활용한다. 센서와 조향장치 등을 추가해 아이오닉 EV를 자율주행차로 개조하는 작업을 진행하고, 이후 일반도로 및 고속도로 실주행을 거쳐 내년 상반기중 '완전 자율주행 전기차' 형태로 완성할 계획이다. 반면 CES에서 선보일 자율주행차는 레이더와 라이다를 각각 절반씩 사용해 센서로 활용한다.
3개 대학 4개 학과로 이뤄진 공동연구실의 명칭은 '차량 통합 안전시스템 연구실(Integrated Vehicle Safety System Research Lab)'이다. 이 공동연구실은 현대자동차그룹 협력연구센터(Hyundai Motor Group Collaborative Research Center)와 손잡고 연구를 진행 중이다. 현대차와 공동연구실은 자율주행차의 안전을 확보하기 위한 미래 기술 개발을 선행 단계에서 같이 하고 있다. 연구실은 현대차로부터 차량과 연구장비 등을 제공받고 기술개발에 힘을 보태는 형식이다.
아이오닉 자율주행 전기차에 앞서 서울대 등 공동연구실은 이미기아차K7을 자율주행차로 개조했다. K7 자율주행차는 현재 일반도로와 주행 환경이 비슷한 서울대 순환도로 3㎞ 반경에서 완전 자율주행을 하면서 운용경험치를 축적하고 있다.
완전 자율주행은 미국 도로교통안전국(NHTSA)이 규정한 자율주행의 4단계(완전 자율주행)를 뜻한다. 핸들을 잡거나 액셀, 브레이크의 도움을 받지 않고 처음 시동을 켠 후 목적지에 도착해 주차가 완료되는 시점까지(door to door) 완전한 자율주행을 하는 것이다.
서울대는 이경수 기계항공공학부 교수가 이끄는 '차량동역학 및 제어연구실'에서 지능형 주행 안전을 위한 통합 판단·제어 기술을 개발 중이다. 이곳에서는 운전자가 조작하지 않아도 차량이 완벽한 핸들링을 구사할 수 있도록, 조종성(maneuverability)을 높이는 '통합 샤시(chassis·차량 뼈대) 제어 기술'을 개발하고 있다. 통합 샤시 제어기술을 통해 급제동, 급선회시 차량의 자세가 안정적으로 유지된다.
이창건 서울대 컴퓨터공학부 교수가 이끄는 연구팀은 시스템 실시간 성능분석 기술 개발과 소프트웨어 구조 최적화를 담당한다. 미래의 컴퓨팅 환경 중 하나로 꼽히는 초고속 자율주행 차량용 제어 시스템 관련 선행 연구를 진행하고 있다.
이밖에 최세범 KAIST 기계공학과 교수가 이끄는 석·박사 연구팀은 핸들링 향상을 위한 제동·구동 통합 제어 기술을, 송봉섭 아주대 기계공학부 교수가 이끄는 연구팀은 통합 인지 센서 모니터링 기술을 개발 중이다.
공동연구실은 차량 동역학(섀시 컨트롤)과 자율주행 시스템(인지, 결정) 등 크게 2가지로 나뉘어 연구를 진행 중이며 통합 샤시 제어 알고리즘, 차량 상태 및 노면 마찰계수 통합 추정, 교차로 포함 도심 주행 상황 대응 등 관련 기술을 연구개발 중이다.
이경수 서울대 교수는 "앞으로 5~7년 후에 자율주행이 현실화되고 기술이 활용되려면 기술 개발, 검증이 많이 돼야 한다"며 "인원이 많이 필요한 연구이므로 대학들이 나서서 선행적으로 협력 연구를 하고, 관련 연구 중인 석·박사들이 현대차에 취업하는 데도 도움이 될 수 있어 연구 성과 공유와 인력 양성 측면에서 이중의 효과가 있다"고 전했다.
현대차는 CES 2017에서 어드밴스드 스마트 크루즈 컨트롤(ASCC)의 전면 레이더, 라이다 센서 기술, 주행 조향보조시스템(LKAS)의 카메라를 결합해 주변 차량을 비롯한 사물을 감지하는 아이오닉 자율주행차를 선보일 예정이다.
레이더 센서와 라이다 센서는 전파에 가까운 성질을 가진 레이저 광선을 쏘아 돌아오는 속도를 계산하는 등 방식으로 외부환경을 3차원으로 인식하는데, 레이더가 라이다보다 적게는 10배, 많게는 50배 가량 저렴하다.
