새 사령탑은 로봇공학자, 클라우드 로봇에 초점 전망

{kind=link}
;올해 10월말 ‘안드로이드의 아버지’로 불리던 앤디 루빈((Andy Rubin) 구글 수석부사장이 회사를 떠난다고 발표해 화제가 됐다. 그의 퇴사는 여러 가지 면에서 구글의 변화를 예고하고 있다. 그는 작은 스타트업의 기술에 불과했던 안드로이드를 10억 명이 사용하는 모바일 플랫폼으로 변화시켜 놓은 주인공이다. 앤디 루빈은 지난해 8개의 로봇 기업을 연달아 인수하며 적극적인 행보를 펼쳤다. 지난해 3월 루빈이 구글의 로봇사업을 맡는다는 소식이 전해졌을 때 로봇계는 큰 꿈에 부풀었다. 하지만 겨우 1년 만에 앤디 루빈이 구글을 떠나게 됐고, 로봇계는 이로 인해 큰 충격에 빠진 모습이다.
{kind=link}
많은 언론들은 루빈의 퇴임을 아쉬워하며 구글 로봇 사업에도 타격이 불가피할 것이라고 전망하고 있다. 하지만 당장 구글의 로봇사업이 표류하거나 타격을 받을 것이라는 예측은 지나친 우려다. 왜냐하면 루빈의 후임으로 임명된 제임스 커프너(Jame Kuffner) 역시 뛰어난 로봇공학자이기 때문이다. 앤디 루빈의 퇴임에 관해서는 많은 기사들이 쏟아졌지만 아직 커프너가 어떤 인물인지에 대해서는 외신에도 자세히 소개된 바 없다.
그러나 커프너가 그간 걸어온 학문적 행보를 짚어보면 미래 구글 로봇이 나아갈 방향을 가늠해 볼 수 있다.제임스 커프너는 1999년 미국 스탠포드대학 컴퓨터과학부에서 박사 학위를 마치고 2년 동안 도쿄대에서 휴머노이드 관련 박사 후 과정을 수료했다. 그는 2002년부터 지금까지 최고의 로봇공학 프로그램을 자랑하는 카네기 멜론 대학 로봇 인스티튜트의 교수로 일해 왔다. 특히 2009년부터는 구글의 연구 과학자를 겸임하고 있으며 지난해까지는 구글의 무인자동차 연구를 이끌어 왔던 것으로 알려져 있다.사실 그의 전문 분야는 무인 자동차가 아니라 로봇의 동작계획(motion planning)이다.
사람과 달리 로봇은 원하는 동작을 구현하려면 각 관절의 모터의 궤적을 적절히 생성해 주어야 한다. 이 궤적 생성의 방법론을 다루는 연구 분야가 바로 로봇의 동작계획이다. 다시 말해 로봇의 동작계획은 ‘작업 목표를 위해 로봇이 어떻게 움직여야 하는가’에 대한 해답을 얻으려는 학문이며, 로봇 움직임에 있어서 두뇌 역할(정확히는 소뇌 역할)을 한다고 비유할 수 있다. 커프너는 동작계획 분야의 대가로 150여 편의 논문을 제출하는 등 뛰어난 연구 성과로 2007년 오카와 재단에서 젊은 과학자상을 수상하기도 했다.
독자들의 PICK!
{kind=link}
그는 세계에서 가장 많이 쓰이는 동작계획 알고리즘 중 하나인 RRT(Rapidly-exploring random trees)의 창시자이기도 하다. 1999년 스티브 라발레(SteveM. LaValle)일리노이대 교수 겸 오큘러스VR의 수석연구원과 함께 고안한 RRT는 그동안 동작계획의 난제로 여겨졌던 다관절 로봇의 동작계획 문제를 매우 효율적인 방법으로 해결했다. 강력한 성능과 간결한 알고리즘의 이점에 힘입어 그들의 논문은 이제까지 3000회 이상 인용됐다.
RRT 알고리즘의 수학적 진보에 힘썼던 라발레와 달리 커프너는 이 알고리즘을 다양한 로봇에 적용해 실제적인 문제를 풀고자 했다. 작업을 위한 휴머노이드, 로봇 팔, 로봇 손의 동작 계획이 대표적인 예다.
나아가 2008년엔 RRT를 포함한 다양한 동작계획 알고리즘을 담은 공개 라이브러리인 오픈레이브(OpenRave)를 발표해 사용자들의 큰 호응을 얻었다. 현재는 많은 로봇 분야에서 오픈레이브를 로봇 동작계획의 기본 툴로 사용하고 있다. 로봇 동작계획의 대가인 커프너가 구글에 합류한 것은 2009년이었다. 당시 그가 구글에 합류한다는 소식에 사람들은 고개를 갸웃거렸다.
{kind=link}
그의 주 연구 분야가 구글이 당시 주력하던 무인자동차 분야가 아니었고,(물론 RRT가 무인자동차의 자율주행에 쓰이기는 한다.) 많은 IT기업과 로봇산업의 접점이라 여겨졌던 로봇 비전분야의 전문가도 아니었기 때문이다. 따라서 그가 합류한 이후 구글의 프로젝트 엑스(Project X)가 본격적으로 휴머노이드 로봇을 개발하는 것이 아니냐는 관측을 낳기도 했다. 하지만 예상과 달리 그는 기존 무인자동차 팀에 합류해 이를 이끌었으며 100만 ㎞의 도로 무인주행을 마칠 정도로 결과는 매우 성공적이었다.
지난해 구글은 빅독을 개발한 보스톤 다이내믹스(Boston Dynamics)와 DARPA 챌린지의 우승팀 샤프트(SCHAFT) 등을 비롯한 8개의 기업을 인수하며 로봇산업에 적극적인 행보를 펼쳤다. 그리고 여러 기술을 가진 인수기업들을 통합하는 과정에서 커프너의 역할이 더욱 중요해졌을 것으로 보인다. 안드로이드 개발을 오랫동안 이끌다가 로봇 분야에 부임한 앤디 루빈보다는 20년 넘게 로봇을 폭넓게 연구해 온 제임스 커프너가 훨씬 기술적 이해도가 깊을 것이기 때문이다.
{kind=link}
비록 IT업계에서는 그에 대해 알려진 바가 많지 않지만, 커프너의 승진 소식을 듣고 러스 테드레이크(Russ Tedrake) MIT교수는 “이 일에 그보다 더 적임자는 상상할 수 없을 것”이라고 평했을 정도로 그는 구글 로봇을 이끌 수 있는 충분한 역량을 가진 재목이다. 그렇다면 그가 이끄는 구글 로봇의 미래는 어떨까? 커프너가 최근 학회에 발표한 논문들을 살펴 보면 그가 상상하는 구글 로봇의 미래를 살짝 엿볼 수 있다. 여기엔 그가 그동안 해왔던 ‘동작계획’ 외에 새로운 키워드가 등장한다. 바로 ‘클라우드 로봇’이다.
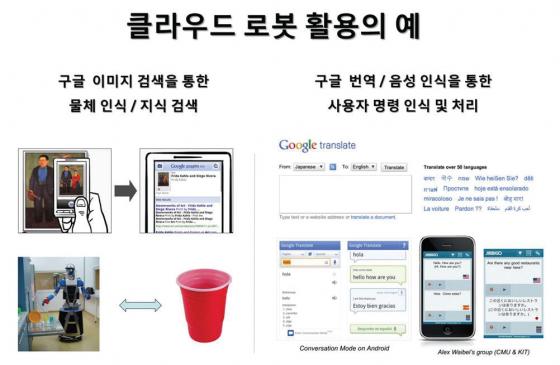
2011년 커프너가 국제로봇학회 ICRA(International Conference on Robotics and Automation)에서 발표한 자료에 따르면, 그는 구글의 방대한 검색 데이터를 로봇의 인공지능에 활용하고자 했다. 최근 클라우드 컴퓨팅 기술의 발달로 집에서도 슈퍼컴퓨터 성능을 구현할 수 있게 됐다. 이를 로봇에 적용하면 로봇은 더 이상 다양한 동작을 위한 대용량 데이터베이스를 탑재하지 않아도 된다.
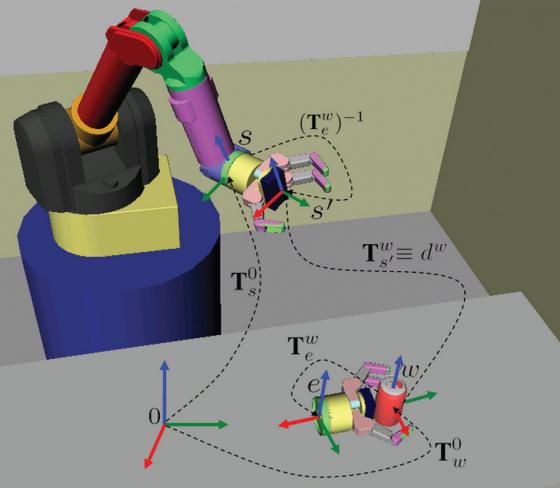
또 특정 로봇의 경험을 다른 로봇과 공유함으로써 집단 지성의 발현도 가능하게 된다. 로봇은 물체 인식, 음성 인식과 같은 무거운 기능을 탑재하기보다 이를 클라우드 컴퓨팅을 통해 해결할 수 있다. 그가 발표한 논문에는 이러한 연구목표가 더욱 분명하게 드러난다. 그가 올해 발표한 논문(구글 물체인식 엔진을 이용한 클라우드 로봇의 파지작업: Cloud-Based Robot Grasping with the Google Object Recognition Engine)은 클라우드 상의 데이터를 이용해 로봇이 다양한 물체를 더 쉽게 알아보고 잡을 수 있다는 것을 보여주었다.

{kind=link}
또 앞으로 3D 모델링 기술과 능동 데이터 습득 기술을 통합해 더욱 적극적으로 공유 지식의 질을 높이겠다는 미래연구 목표를 밝히고 있다. 이를 종합해 보면 구글 로봇은 구글 클라우드 스토리지를 중심으로 하는 로봇지식 생태계를 발전시켜 나갈 것으로 보이며, 방대한 데이터를 기반으로 한 인공지능을 앞세워 로봇기술을 한 단계 더 끌어올릴 전망이다. 사실 클라우드 로봇 기술의 전쟁은 이미 시작되었다.
중국의 알리바바를 상장시키며 다시 한 번 아시아 최고의 혁신가임을 증명한 일본 소프트뱅크의 손정의 회장은 이미 올해 6월 감정로봇 페퍼를 공개해 세계를 깜짝 놀라게 한 바 있다. 욱 놀라운 것은 이 로봇이 원가에도 못 미칠 것이라 예상되는 단돈 200만 원에 판매된다는 것. 여기에는 싼 가격에 로봇을 보급해 충분한 데이터를 축적하고 이를 기반으로 클라우드 로봇의 선두주자로 발돋움하고자 하는 손정의 회장의 전략이 숨어있다.
커프너가 이끄는 구글의 클라우드 로봇사업 역시 ‘어떻게 클라우드 상에 많은 사용자-로봇 데이터를 수집하느냐’와 ‘이들 지식을 로봇에 어떻게 활용할 것인가’가 미래 클라우드 로봇산업 전략의 키가 될 전망이다. 아울러 지난해 인수한 8개 로봇기업들의 핵심 기술을 얼마나 잘 융합해 내느냐에 따라 구글의 로봇분야는 크게 융성할 수도, 또는 난관에 봉착할 수도 있을 것이다.
글 엄태웅 캐나다 워털루대 연구원 ;